
 首页 > 资源中心 > FAQ
首页 > 资源中心 > FAQ 在keil软件中创建ARM工程的时候,总是在工程看到有startup_xxxx_hd.s(xxxx为芯片型号)这样一个文件,该文件为ARM的启动文件。在工程的main函数执行之前的工作就是执行启动文件。接下来就具体剖析一下启动文件的内容与工作。
一、堆栈空间的定义
首先,一开始启动文件的任务是对于栈空间进行定义:
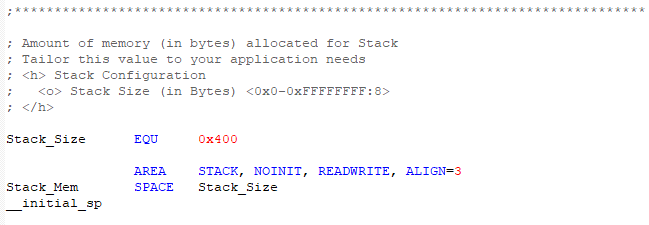
Stack_Size EQU 0x400:定义栈的空间大小1024字节。
AREA STACK, NOINIT, READWRITE, ALIGN=3:STACK为段名,可以随意命名;NOINIT表示不初始化;READWRITE表示可读可写;ALIGN=3表示按照栈空间按照2^3字节对齐
Stack_Mem SPACE Stack _Size:开辟栈大小1024B并用0填充
__initial_sp:标记栈顶的地址
然后是对于堆空间的定义

Heap_Size EQU 0x200:定义堆大小为512字节
AREA HEAP, NOINIT, READWRITE, ALIGN=3:HEAP为段名,可以随意命名;NOINIT表示不初始化;READWRITE表示可读可写;ALIGN=3表示按照堆空间按照2^3字节对齐
__heap_base:堆空间基址(即起始地址)
Heap_Mem SPACE Heap_Size:开辟堆空间512字节,并清0
__heap_limit:堆空间结束地址
PRESERVE8:设置这个文件告诉编译器链接时堆栈是8字节对齐
THUMB:开始使用thumb指令模式
二、中断向量表的定义
在堆栈定义好后,接下来的工作就是对于中断向量表进行定义。
1、中断向量定义的入口,声明一些变量。
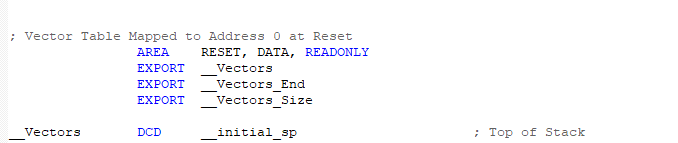
AREA RESET, DATA, READONLY:表示复位后,中断向量表映射到地址0
EXPORT __Vectors:声明全局符号,表示中断向量表入口地址
EXPORT __Vectors_End:声明全局符号,中断向量表结束地址
EXPORT __Vectors_Size:声明全局符号,中断向量表大小
__Vectors DCD __initial_sp ; Top of Stack:表示栈顶地址
2、定义中断的函数指针了。
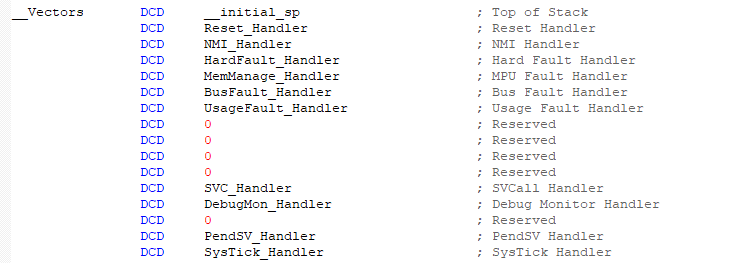
Reset_Handler定义的是复位中断的函数指针,NMI_Handler到SysTick_Handler就是内核中断的函数指针。


然后从WWDG_IRQHandler到WAKEUP_PIN_IRQHandler就是外设中断的函数指针。
最后,__Vectors_End表示中断向量表结束。
3、配置中断向量表。
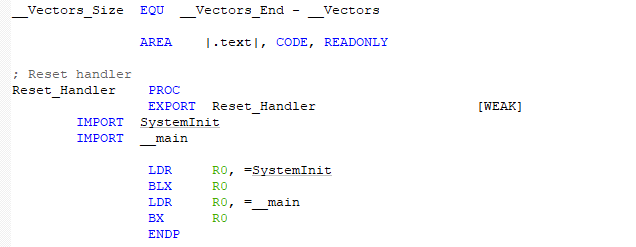
_Vectors_Size EQU __Vectors_End - __Vectors:计算中断向量表的长度
AREA |.text|, CODE, READONLY:定义为只读代码段
Reset_Handler PROC:表示复位中断服务的入口
EXPORT Reset_Handler [WEAK]:这里声明复位中断向量为全局的,可供外部调用,WEAK标记本代码为备用编译
IMPORT SystemInit:表示导入systeminit
IMPORT __main:表示导入C库中的main标号,这个是C库中的内容,非JNH官网自己的main函数
LDR R0, =SystemInit:让R0等于SystemInit的地址
BLX R0:表示跳到systeminit
LDR R0, =__main:让R0等于main的地址
BX R0:执行lib_init等C库的初始化工作,结束后再进入用户的main函数
ENDP:结束
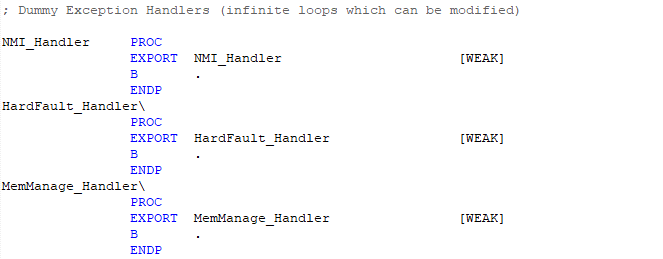
三、虚拟异常处理程序
这里要进行说明的是[WEAK],weak标记说明:如果使用这个备用的函数(外部文件中没有XXX_Handler),这里的B指令用nop替换,让编译器忽略,外部找不到任何NMI_Handler函数时的警告或错误。
四、用户栈和堆初始化的一个过程
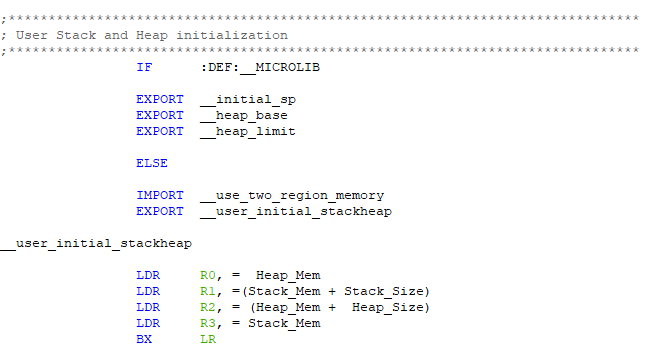
以上就是ARM启动文件的主要内容。


